Axes
X, Y, and Z are primary linear motions
A, B and C define rotary axes about linear axes X, Y and Z respectively.
Positive A, B and C are clockwise about the linear axes looking along the linear axes in the positive direction
U, V, and W are secondary linear axes parallel to the X, Y, and Z axes, respectively
P, Q, and R are tertiary linear axes parallel to the X, Y, and Z axes, respectively
Definitions
Axis Average Line - XX
Angular Error Motion of a Linear Axis - rotational motions of the carriage about each linear axis as it traverses along its nominal trajectory
Linear Positioning Error Motion - unwanted linear motion along the direction of nominal motion
Linear Positioning Deviation - actual position minus target position
Straightness Error Motion - unwanted linear motion in one of the two directionis orthogonal to the direction of nominal motion
Straightness Deviation - distance the functional point is from the reference straight line that is fitted to the axis trajectory
Rotary Axis Error Motions
Axis Average Line - XX
Axis Shift - quasi-static change in location and orientation of the axis average line due to a change in conditions
Angular Positioning Error Motion - unwanted motion along the direction of rotation that results in the actual angular position reached by the rotating component differing from the local commanded position
Angular Positioning Deviation - actual angular position reached by the rotating component minus the commanded/target position
Axial Error Motion - error motion coaxial with the axis average line
Radial Error Motion - error motion in a direction perpendicular to the axis average line at a specified axial location
Tilt Error Motions - error motion in an angular direction relative to the axis average line
XXX
Pitch - rotation around an axis in the horizontal plane perpendicular to the direction of travel
Roll - rotation around an axis in the horizontal plane parallel to the direction of travel
Yaw - rotation around an axis in the vertical plane perpendicular to the direction of travel
A-axis Errors
- EAA - angular positioning error of A
- EBA - tilt error of A about the Y-axis
- ECA - tilt error of A about the Z-axis
- EXA - axial linear error of A n the X-axis direction
- EYA - radial error motion of A in the Y-axis direction
- EZA - radial error motion of A in the Z-axis direction
B-axis Errors
- EAB - tilt error of B about the X-axis
- EBB - angular positioning error of B
- ECB - tilt error of B about the Z-axis
- EXB - radial error motion of B in the X-axis direction
- EYB - axial linear error of B n the Y-axis direction
- EZB - radial error motion of B in the Z-axis directio
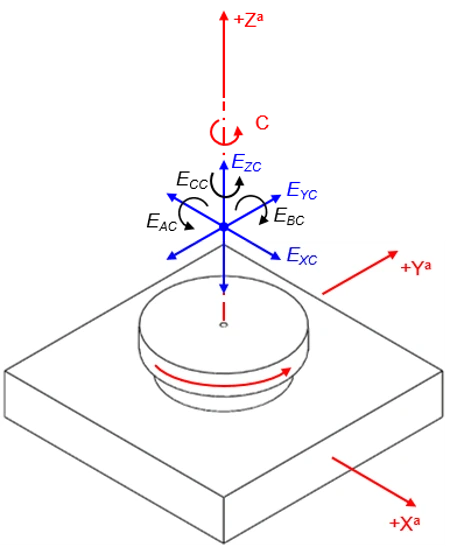
C-axis Errors
- EAC - tilt error of C about the X-axis
- EBC - tilt error of C about the Y-axis
- ECC - angular positioning error of C
- EXC - radial error motion of C in the X-axis direction
- EYC - radial error motion of C in the Y-axis direction
- EZC - axial linear error motion of C in the Z-axis direction
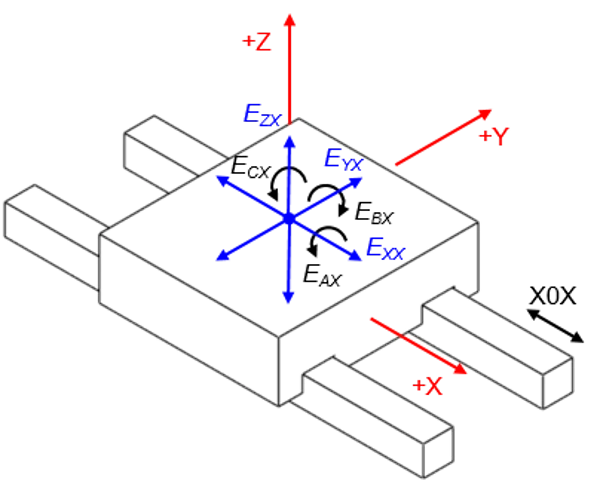
X-axis Errors
- EAX - angular error motion of X about the X-axis - roll
- EBX - angular error motion of X about the Y-axis - pitch
- ECX - angular error motion of X about the Z-axis - yaw
- EXX - linear positioning error of X
- EYX - linear error motion of X in the Y-axis direction
- EZX - linear error motion of X in the Z-axis direction
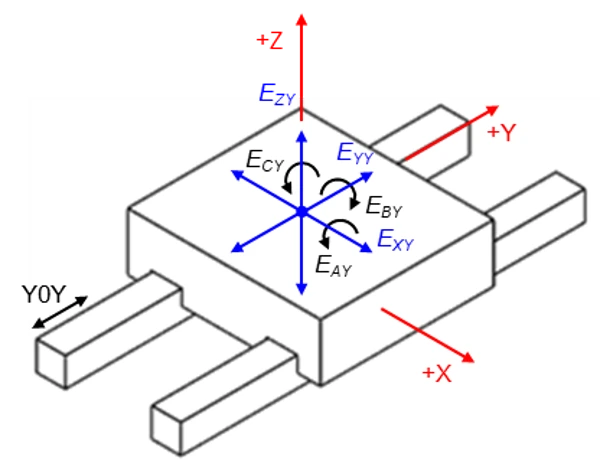
Y-axis Errors
- EAY - angular error motion of Y about the X-axis - X
- EBY - angular error motion of Y about the Y-axis - X
- ECY - angular error motion of Y about the Z-axis - X
- EXY - linear error motion of Y in the X-axis direction
- EYY - linear positioning error of Y
- EZY - linear error motion of Y in the Z-axis direction
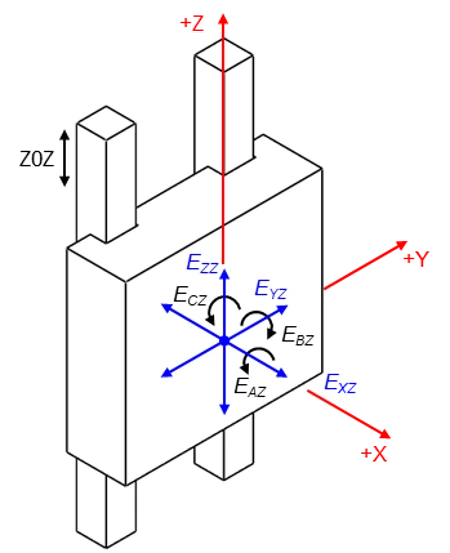
Z-axis Errors
- EAZ - angular error motion of Z about the X-axis - X
- EBZ - angular error motion of Z about the Y-axis - X
- ECZ - angular error motion of Z about the Z-axis - X
- EXZ - linear error motion of Z in the X-axis direction
- EYZ - linear error motion of Z in the Y-axis direction
- EZZ - linear positioning error of Z
Linear Axis Squareness Error Terms
- EAOY - squareness of Y to Z
- EAOZ - squareness of Z to Y
- EBOX - squareness of X to Z
- EBOZ - squareness of Z to X
- ECOY - squareness of Y to X
- ECOX - squareness of X to Y
Rotary Axis Offset Error Terms
- EXOB - error of the position of B in X-axis direction
- EXOC - error of the position of C in X-axis direction
- EYOA - error of the position of A in Y-axis direction
- EYOC - error of the position of C in Y-axis direction
- EZOA - error of the position of A in Z-axis direction
- EZOB - error of the position of B in Z-axis direction
Orientation Error Terms
- EAOB - error of the orientation of B in the A-axis direction; squareness of B to Y
- EAOC - error of the orientation of C in the A-axis direction; squareness of C to Y
- EAO(C) - error of the orientation of the spindle (C) in the A-axis direction; squareness of (C) to Y
- EBOA - error of the orientation of A in the B-axis direction; squareness of B to Y
- EBOC - error of the orientation of C in the B-axis direction; squareness of C to X
- EBO(C) - error of the orientation of the spindle (C) in the B-axis direction; squareness of (C) to X
- ECOA - error of the orientation of A in the C-axis direction; squareness of A to Y
- ECOB - error of the orientation of B in the C-axis direction; squareness of B to X
Workpiece Error Terms
- EAOw - error of the orientation of the workpiece w about the X-axis
- EBOw - error of the orientation of the workpiece w aboutthe Y-axis
- ECOw - error of the orientation of the workpiece w about the Z-axis
- EXOw - error of the position of the workpiece w in X-axis direction
- EYOw - error of the position of the workpiece w in Y-axis direction
- EZOw - error of the position of the workpiece w in Z-axis direction
Tool Error Terms
- EAOt - error of the orientation of the tool t about the X-axis
- EBOt - error of the orientation of the tool t about the Y-axis
- ECOt - error of the orientation of the tool t about the Z-axis
- EXOt - error of the position of the tool t in X-axis direction
- EYOt - error of the position of the tool t in Y-axis direction
- EZOt - error of the position of the tool t in Z-axis direction
References
- ASME B5.54, 2005, Methods for Performance Evaluation of Computer Numerically Controlled Machining Centers
- ISO 230-2:2006(E), Test code for machine tools – Part 2: Determination of accuracy and repeatability of positioning numerically controlled axes
- IS0/TR 230-9:2005(E), Test code for machine tools – Part 9: Estimation of measurement uncertainty for machine tool tests according to series ISO 230, basic equations
- JCGM 100:2008, Evaluation of measurement data – Guide to the expression of uncertainty in measurement, 2008